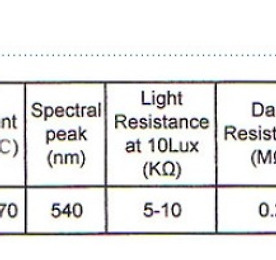
hs-311 썸네일형 리스트형 디지털 도어락 안녕하세요 숭덕이 박제현입니다. 요즘 너무 뜸하게 블로그를 관리했네요....무엇을 만들가 무엇을 만들가 고민고민하다가 벌써 이렇게 시간이 많이 지체가 되었네요....이제부터는 작품을 만들어서 작품을 공부하시는 분에게 기증하기로 마음을 먹었습니다. 디지털도어락은 키패드와 LCD 모터부분으로 3개를 준비했습니다. 머 부수적인 부품은 몇개가 있겠지만 큰것만 적어보니 3개 있더라고요!!!! 자 이제 그럼 곧 시작해보겠습니다. 음 간단히 키패드 확인만 해봤습니다. 음 키패드의 번호가 눌리면 해당 LED가 켜지는것을 했는데요 채터링때문인지 가끔 다른 LED가 켜지는것을 봅니다. 그래서 채터링 방지 딜레이를 사용했습니다. 소스는 아래 있습니다. #include #include void keypad(void) { PO.. 더보기 초음파센서를 이용한 거리측정 및 모터제어 안녕하세요 숭덕이 박제현 입니다. 회사에서 일끝나고 또 의자에 앉아 이렇게 글을 남깁니다. 조금 있으면 블로그시작한지 음 기억이 안나요!!!!!!!!암튼 초음파로 거리측정하고 모터를 움직여보겠습니다.. 데이터시트 주파수 40Khz 최대 측정거리 3~4M 최소 측정거리 1CM 입력전압 5V 초당 측정횟수 1000ms(1초) 한번 측정시 50ms 1초당 약 20회 입력신호 10usec 소비전류 4mA 크기 43 * 20 * 17 mm 스펙참조 (http://eleparts.co.kr/front/productdetail.php?productcode=005035002004000009&sort=) SRF-05 Single Pin Mode SRF-05에 제가 쓸 핀은 VCC,Echo,Trigger,Gnd 4개의 핀.. 더보기 HS-311 (서보모터 제어하기) 안녕하세요 숭덕이 박제현입니다. 오늘은 서보모터에 대해 공부할겁니다. 음 제가 이번에 암제어 로봇을 만들고 싶어 서보모터에 대해 자료조사를 하다 좋은 자료인거 같아 몇가지 자료를 올립니다. 암로봇이라 해서 특정지역이나 사람이 오갈 수 없을 때 유용하게 사용되거나 의료시술, 공장 특정제어 등 많은 곳에 쓰이고 많은곳에 현재에도 많이 쓰이는것으로 알고 있습니다. 저는 이 작품을 포맥스로 이용해 통신으로 제어를 해보겠습니다 일단 모터에 대해서만 서술하는 내용이니 HS-311에 대해서만 말씀드리겠습니다. 출처 : http://www.google.co.kr/imgres?imgurl=http://www.yeogie.com/wwwfiles/img.board/000000000459/E23DE056-652A-42F1-A.. 더보기 CDS 센서특성 조도 센서(CDS) – 조도 센서는 광센서의 가장 기본적인 센서로서, 빛의 밝기에 대하여 전기적인 성질로 변환시 켜주는 역할을 하는 센서 – CDS는 가장 보편적으로 사용되는 조도 센서로서 밝기에 비례하여 저항이 선형적으로 증가 하는 것이 아니라 로그 그래프에 가까운 형태를 그리기 때문에 정확한 Lux 값을 구하기보다 는 “밝다 / 어둡다” 정도만을 판별하기에 적합한 센서 – 다른 이름으로는 광도전셀이라고 불리기도 하며 어두운 곳에서는 절연체와 같이 저항이 높아 졌다가 가시광선이 닿으면 도체와 같이 저항이 낮아지는 성질을 가짐 – 이 센서는 고감도, 소형, 저가격, 가시광선에 민감하다 등의 장점이 있지만 반응시간이 느려 즉각적인 반응을 필요로 하는 센서에는 적합하지 않다. 광량이 많을 시 빨라지는 등 광.. 더보기 무인탐사로봇 (JH) 6족 만들기전에 간단히 4족로봇을 만들어 보았다.... 동영상은 완성 50% 정도 된 동영상입니다................100%는 환상적이였다는................ㅅ.ㅅ 더보기 이전 1 다음